What crossing technologies are available?
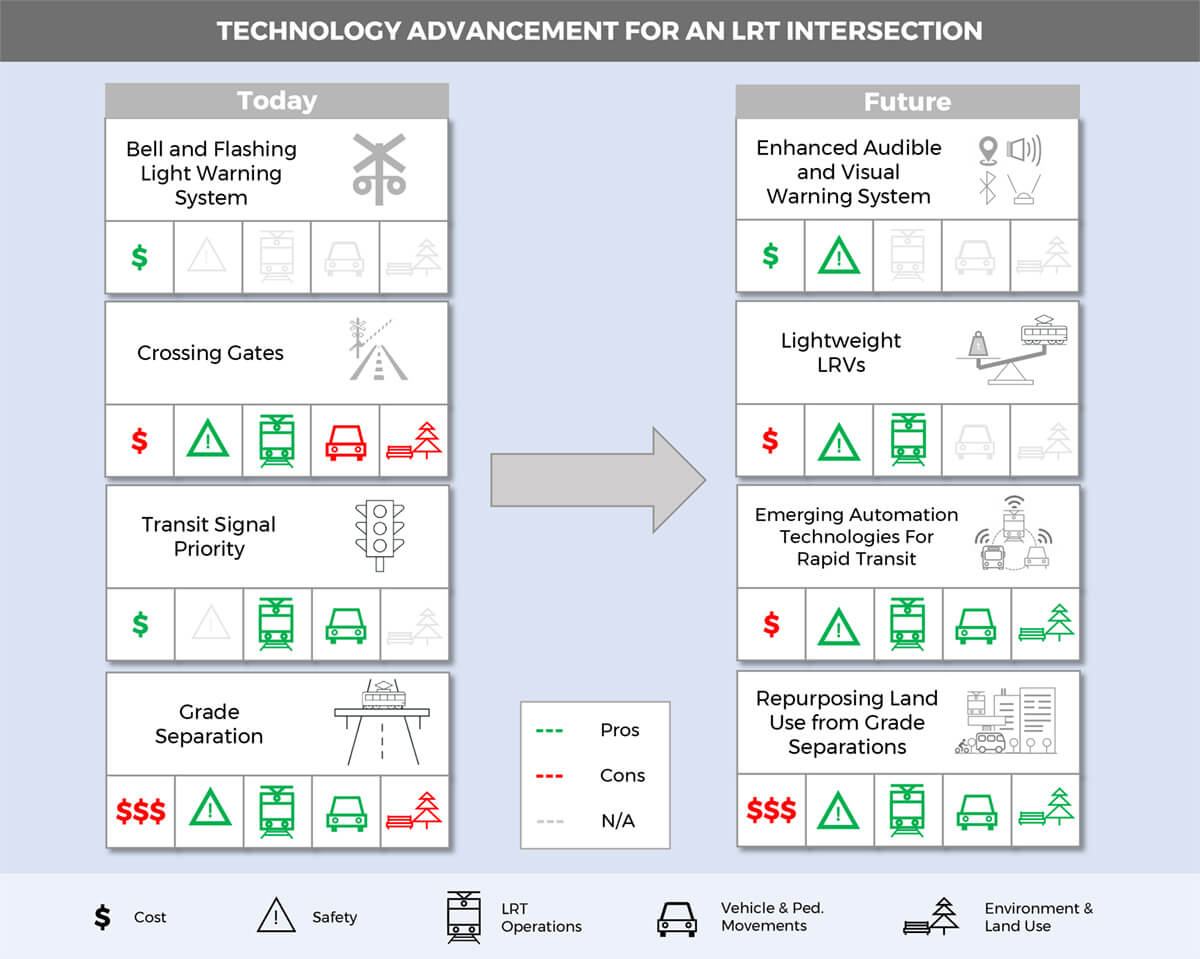
Currently, there is variety of options available for an LRT crossing, including regular audible and visual warning systems (bells and flashing lights), crossing gates, Transit Signal Priority (TSP), and grade separation.
Audible and visual warning signs: Amongst these options, the simplest, most common, and lowest cost is to install bells and flashing lights at the crossing area to warn the traffic and pedestrian flow of an approaching LRT vehicle. This solution can be effective when both rail and traffic volume are low, however it is a “bare-minimum” warning system. While inexpensive to implement, it does not optimize traffic nor LRT flow, and can result in operational and potentially unsafe interferences from pedestrians and cars accidentally entering the LRT right of way.
Crossing Gates: They are often installed for further protection. Transport Canada provides criteria in its Grade Crossing Handbook6 to determine whether crossing gates are required at a railway crossing, with main considerations being speed, traffic, and LRT volume. When implementing a full-preemption strategy, LRT operation is protected by gates and has full priority over vehicular, bicycle, and pedestrian traffic. However, this can be disruptive. According to a City of Edmonton report, a vehicle can spend up to 16 minutes in traffic at crossing gates and the GHG emissions produced from cars while idling behind gates could become a major concern to the environment. An alternative is to apply “soft-preemption”, where the priority of a Light Rail Vehicle (LRV) is determined based on certain criteria such as clearance of the previous train and real-time traffic volume on opposing movements.
Traffic Signals/Transit Signal Priority: Another way to control an LRT crossing is by using traffic signals, where an LRV is treated as a regular transit vehicle and should obey traffic signals. This method can be combined with TSP which provides an operational strategy to better facilitate the movements of in-service transit vehicles through such intersections. Unlike preemption methods, TSP does not abruptly stop any traffic to fully protect another. Its main objective is to improve transit efficiency and schedule adherence, while minimizing the impact to local traffic. TSP systems are usually made up of four components: Transit Vehicle Detection System; Request Generator; Priority Control Strategies and Management Software. TSP can be implemented in various ways:
- Passive priority (serves the transit phase all the time, irrespective of a transit vehicle being present)
- Active priority (Actively adjusts signal timings based on approaching transit vehicles using techniques such as green extension, early green, actuated transit phases, phase insertion/rotation)
- Adaptive priority (intakes real-time data from all modes of transportation /requests to determine phase and cycle length for efficient traffic flow)
TSP can be applied unconditionally (always prioritize transit vehicles) or conditionally (only prioritize transit vehicles based on certain criteria, such as a behind-schedule vehicle). TSP can be applied at an isolated intersection, as well as along a major transit corridor where peer-to-peer communications can be used between signal controllers to maximize its benefits. Peer-to-peer communications allow the signal controllers to communicate LRV locations and estimated travel times between intersections. Accompanying any TSP deployment with a traffic signal optimization study will also improve the overall performance of the corridor. A simple TSP presentation for an LRT intersection is shown below.